




NEMA 17/23 CANopen интегрированный шаговый двигатель контроллер драйвер Замена PLC

PUSIROBOT Official Store
Информация о магазине
Стаж работы магазина PUSIROBOT Official Store можно посмотреть на странице заказа товара.
*Внимание! Точную цену на данный товар Вы можете узнать непосредственно у продавца! На 27.04.2026 стоимость указанная на данной странице уже могла измениться! * Узнать цену *
Общее описание
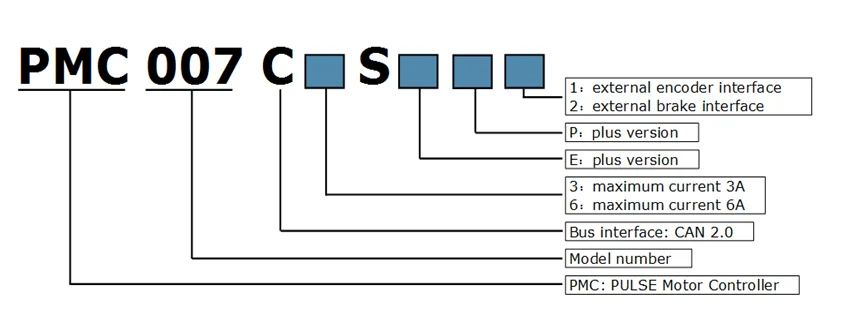
PMC007 является своего рода миниатюрный интегрированный шаговый двигатель микрошаговый контроллер, который может быть непосредственно установлен в задней частиNEMA17/NEMA23/NEMA34Серия шагового двигателя. Контроллер серии предоставляет различные модели, которые могут быть выбраны на основе управления шиной can и различных значений тока. Легко достичь промышленной сети управления до 120 узлов, которые могут достичь замкнутого контроля на основе кодировщика в соответствии с требованиями пользователя. PMC007 принимает промышленный стандартный протокол управления CANOPEN DS301, который не только значительно упрощает сложность системы управления верхним слоем, но и максимально сохраняет гибкость управления и подходит для всех видов высокой точности, широкий спектр использования в промышленности.
Особенности

Интеллектуальная сеть CANopen
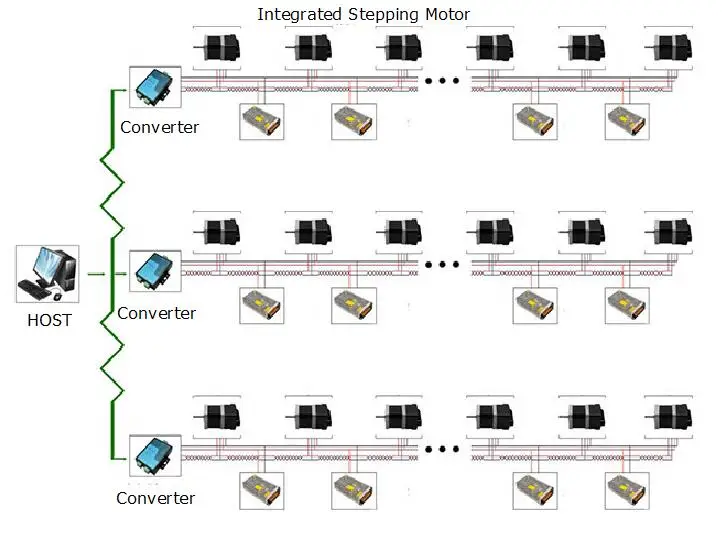
Интеллектуальная сеть CANopen: Подключение CAN bus может достигать максимальной дальности передачи 5000 метров. Он предоставляет сетевую схему, которая использует CAN bus для подключения нескольких контроллеров PMC007CxSxP на рис. 3-2, которые совместимы с CAN2.0A и CAN2.0B двумя техническими характеристиками и могут быть подключены к 127 узлам. PMC007CxSxP поддерживает стандартный протокол DS301 CANopen, cqpsi предоставляет специализированное программное обеспечение для отладки PUSICAN для отладки PMC007CxSxP network. Программное обеспечение для инструментов в настоящее время поддерживает различные модули USB2CAN, которые были основными брендами на рынке.

Интегрированная установка
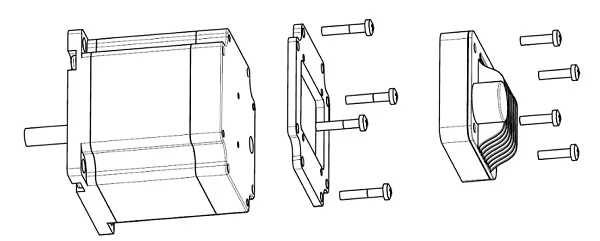
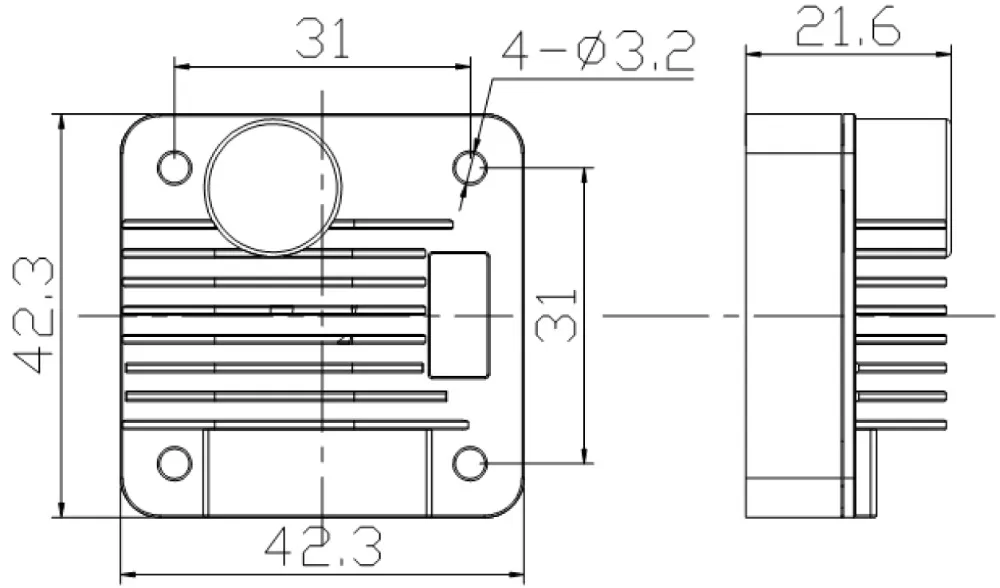
Интегрированная установка: как показано на рисунке, контроллер микрошагового двигателя PMC007 принимает высокоинтегрированный чип обработки и дизайн интегральной схемы. Общий размер контроллера составляет всего 42 мм * 42 мм * 21,6 мм, который может быть непосредственно установлен в задней частиNema 17/23Шаговый двигатель серии etc, этот метод проектирования может значительно сэкономить место установки и уменьшить жгут проводов многоблочной сети в то же время.
Множественная защита
Множественная защита: микрошаговый контроллер PMC007 принимает прецизионный алюминиевый корпус, который может способствовать защите и рассеиванию тепла. В то же время контроллер имеет несколько защитных конструкций с функциями защиты от перенапряжения, перегрузки по току и перегрева.
Простые варианты не требуют использования хост-компьютера.
Программы записываются и запускаются в автономном режиме
Пользовательская программа: интегрированный Драйвер шагового двигателя PMC007 может быть настроен в автономном режиме. В этом режиме контроллер автоматически выполняет пользовательский код пользователя после включения, код скомпилирован и заранее сгорел до EEPROM через программное обеспечение cqpsi. В некоторых простых сценариях применения пользователь может использовать инструмент отладки psi для записи желаемых эффектов программы в контроллер. После экономии, пользователю не нужен хост-компьютер, только нужно поставить питание к контроллеру для достижения контроля.
Стандартный интерфейс
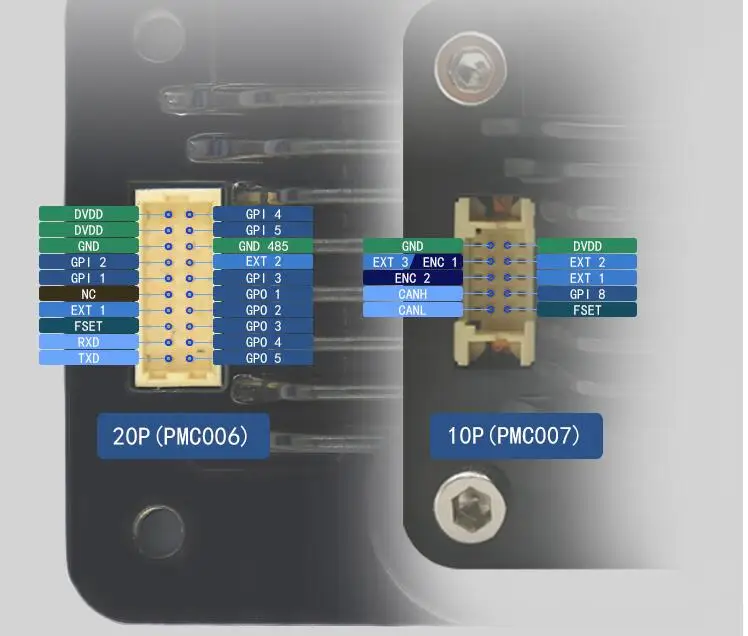 Стандартный интерфейс:
Описание соединителя
Стандартный интерфейс:
Описание соединителя
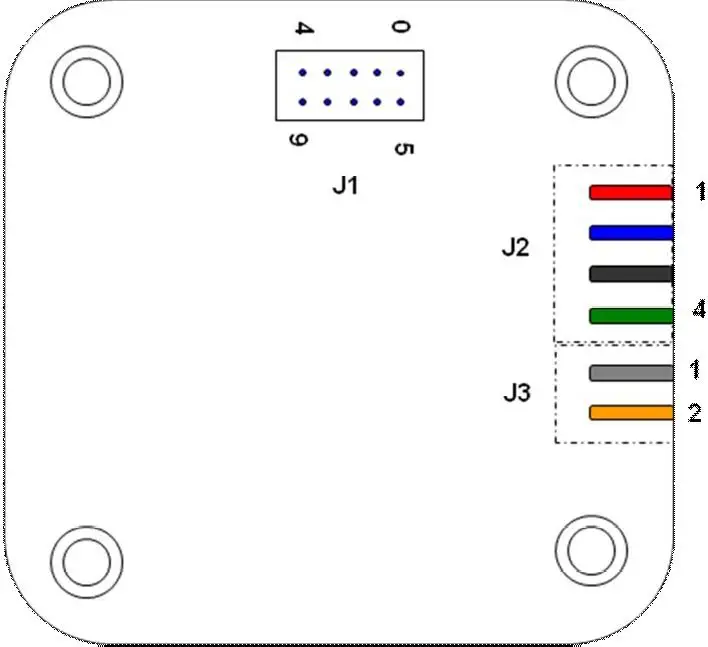 Расположение порта терминала
Расположение порта терминала
|
Контактный номер: |
1 |
2 |
3 |
4 |
|
Дизайн: |
M10 |
M11 |
M20 |
M21 |
Описание:
M10,M11: фаза шагового двигателя A
M20,M21: фаза шагового двигателя B
Предупреждение: неправильное подключение питания или фазы навсегда повредит контроллер! (Соответствует красному, синему и черному, зеленому порядку в закрытом виде).
Подключение питания J3|
Контактный номер: |
1 |
2 |
|
Дизайн: |
GND |
VCC |
Описание:
VCC: напряжение питания, 12 ~ 36 В постоянного тока.
GND: Заземление напряжения питания.
Примечание:
1. Когда ток превышает 3 А, рекомендуется подключить электролитический конденсатор не менее 1000 мкФ рядом с интерфейсом J3.
2. Горячая вилка запрещена, что может навсегда повредить контроллер!
Подключение сигнала J1|
Контактный номер: |
0 |
1 |
2 |
3 |
4 |
|
Дизайн: |
GND |
Катушка + |
Катушка- |
CANH |
CANL |
|
Контактный номер: |
5 |
6 |
7 |
8 |
9 |
|
Дизайн: |
DVDD |
Аин/EXT2 |
EXT1 |
GPIO8 |
FSET |
Описание:
DVDD: выход напряжения контроллера (+ 5 В). Максимальный ток-100 мА.
GND: контроллер цифровой заземления.
EXT1: входной сигнал внешнего концевого переключателя 1, 0 ~ 24 В.
Ответ: аналоговый вход для регулировки скорости, 0 ~ 3,3 В.
GPIO8: цифровой вход и выход, 0 ~ 3,3 В.
FSET: заводской сброс ввода, 0 ~ 3,3 В. Низкий уровень эффективности.
CANH: подключение к модулю приемопередатчика CAN.
CANL: подключение к модулю приемопередатчика CAN.
Катушка +: Соленоидный клапан/тормозной блок управления, напряжение которого равно напряжению источника питания VCC.
Катушка-: Соленоидный клапан/тормозной терминал отрицательного управления.
Предупреждение: напряжение всех портов сигнала должно быть между-0,3 В ~ + 5,3 В, в противном случае это может привести к постоянному повреждению контроллера.
Ускорение и торможение s-образной кривой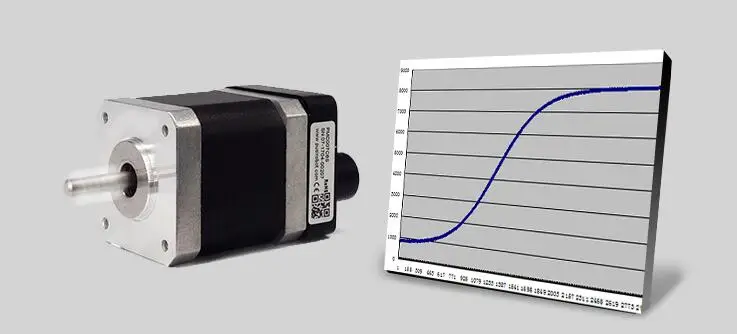 Ускорение и замедление S-curve: контроллер PMC006B4 поддерживает функцию автоматического ускорения и замедления S curve без поддержки дополнительного модуля. После того, как ускорение/замедление/Начальная скорость/стоп задается инструкцией, контроллер рассчитывает кривую ускорения в режиме реального времени до тех пор, пока не будет поймана Максимальная скорость. Затем контроллер рассчитывает кривую замедления, чтобы контролировать замедление двигателя.
Среда развития
Ускорение и замедление S-curve: контроллер PMC006B4 поддерживает функцию автоматического ускорения и замедления S curve без поддержки дополнительного модуля. После того, как ускорение/замедление/Начальная скорость/стоп задается инструкцией, контроллер рассчитывает кривую ускорения в режиме реального времени до тех пор, пока не будет поймана Максимальная скорость. Затем контроллер рассчитывает кривую замедления, чтобы контролировать замедление двигателя.
Среда развития
(Подключение непосредственно к компьютеру без других контроллеров)
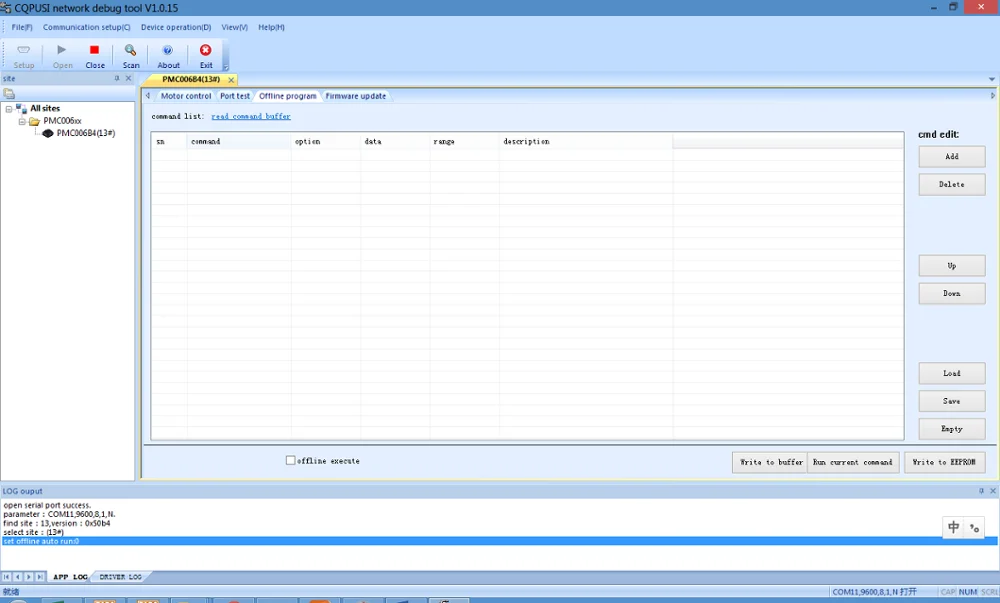
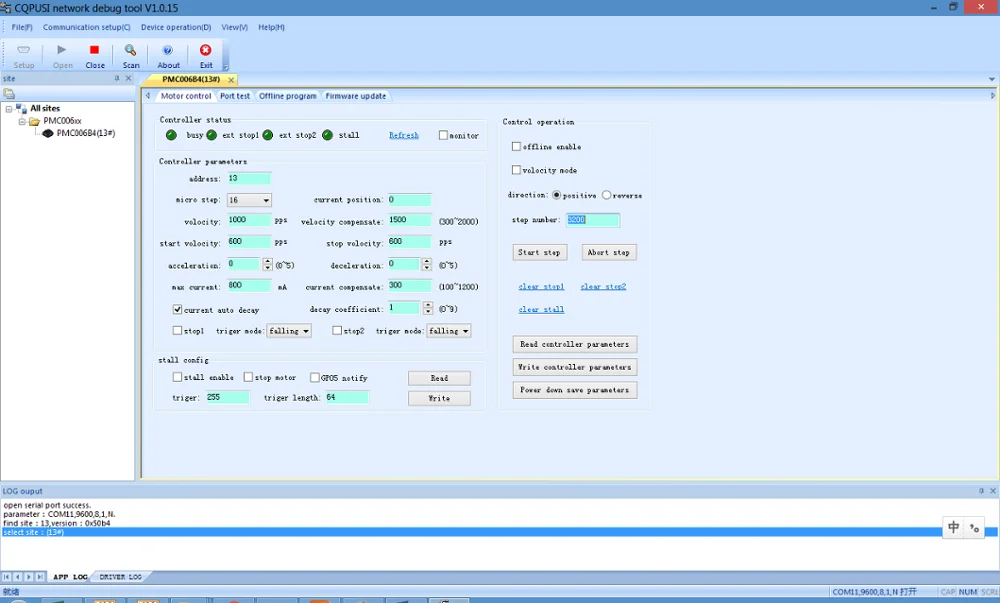
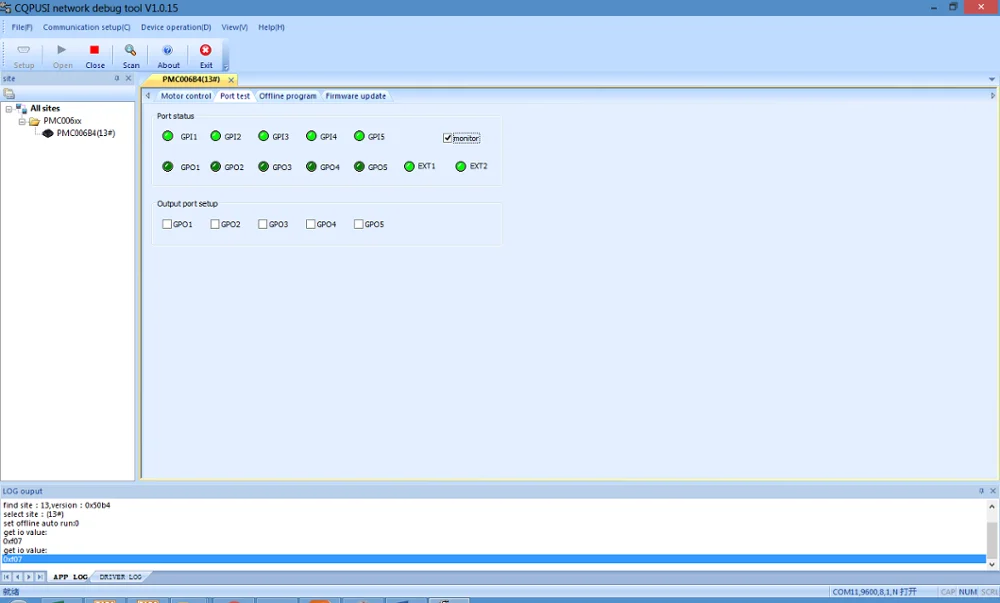
Введение в инструмент отладки
Подключение
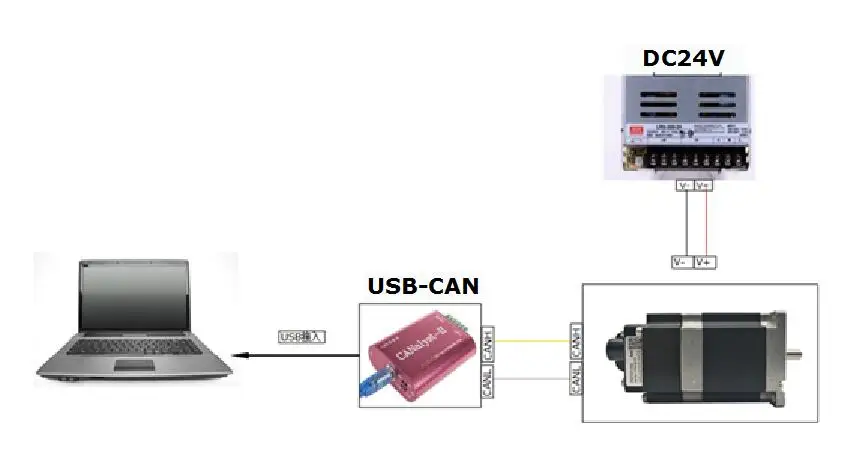
Интерфейс отладки
Реальные фотографии

Технические данные
Общий
| Серия автобусов PMC007 | |
| Хост | ПК, ПЛК, MCU |
| Поддерживающий двигатель | Двухфазный шаговый двигатель |
| Среда развития | VC C # Labviwe VB Linux Python |
| Напряжение источника питания | DC12-48V |
| Выходной ток |
DC 0,4-6A |
| Микрошаговый | 0/256 регулируемый |
| Температура | -20 ℃-80 ℃ |
| Максимальная частота импульса | 200K |
| Долговечность | Более 20 000 часов |
Режим управления
| Описание | |
| Режим управления | Режим положения, режим скорости, режим PV, режим PP, режим PVT, аналоговое регулирование скорости, аналоговое позиционирование, синхронное позиционирование |
| Переключение режимов | Указанное переключение инструкции |
Вход
| Общий ввод/вывод | Описание |
| Функция IO | Аварийный Стоп Вход, Управление тормозом, цифровой вход/выход, аналоговый вход, заводской сброс, выход 5 В |
| Входные характеристики |
Цифровое Входное напряжение: 0-5 В Аналоговое регулирование скорости Входное напряжение: 0-3,3 В Аварийное стоп Входное напряжение: 0-24 В |
Связь с продавцом
| Описание | |
|
Протокол |
CANopen DS301/DS402 |
| Скорость передачи данных | 5k-1M bps |
Деменция (мм)
Скачать
| CAD | . DWG |
| 3D файл | . STP |
| Руководство пользователя | Флуоресцентный |
| Программное обеспечение для отладки | PUSICAN_V1.0.47.rar |
| Разработка документа | CE |
Руководство по выбору
Комплектация

Для получения дополнительной информации перейдите на наш официальный сайт или отправьте электронное письмо на наш почтовый ящик
 Идёт загрузка...
Идёт загрузка...Отзывы о других товарах
Валерий: Сегодня получил эту куртку и хочу сказать, что покупка меня совершенно не разочаровала. Полное соответствие описанию и фото на сайте, размер также подобрал т...
Читать полностью...
Оксана: Довольно не плохой конструктор , заказывали его для дочки так как хотела себе домик для принцессы. Пришло все в точности как в описании , все целое и крас...
Читать полностью...
Виктория: Платье очень симпатичное, моей доченьке очень понравилось. Случайно наткнулась на объявление этого платья, присмотрелась, вроде бы симпатичное, а потом оказалось, ч...
Читать полностью...
Екатерина: Заказывала его для дочери. Идет от шести лет. Количество деталей 117 шт, достаточно крупные. Элементы яркие, всего хватило. очень понрав...
Читать полностью...
Инна: Нам с дочкой нужны были платья для фотосессии. Хотелось, чтоб они были и нарядными, и чтоб потом можно было носить их на любой случай. Здесь большой выбор ...
Читать полностью...
Екатерина: Долго не решалась, но все-таки муж меня переубедил заказать эту курточку. По тем фотографиям, которые предоставлены на сайте, мне очень понравилас...
Читать полностью...
Данный товар, можно так же приобрести с кэшбэком до 5%! Подробнее тут:










