



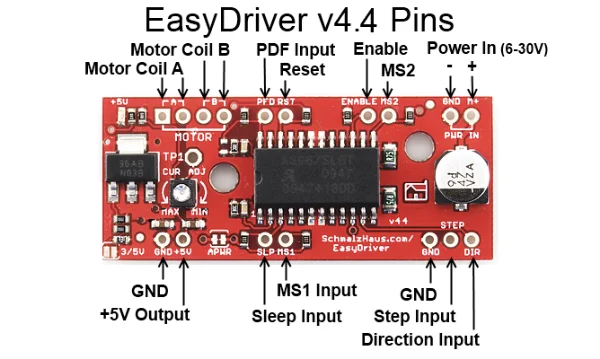
1 шт. A3967 шаговый двигатель EasyDriver Драйвер двигателя V44 для arduino плата разработки 3D

HWA YEH experience Store
Информация о магазине
Стаж работы магазина HWA YEH experience Store можно посмотреть на странице заказа товара.
*Внимание! Точную цену на данный товар Вы можете узнать непосредственно у продавца! На 21.05.2026 стоимость указанная на данной странице уже могла измениться! * Узнать цену *
Легкие примеры драйверов
Код образца и проекты, чтобы получить ваш шаг!
Описание:
Lotsof People приглашает их работать просто хорошо в своем проекте. Но некоторых нет, и поэтому я думал, что было бы хорошей идеей написать некоторые простые инструкции, чтобы ваш легкий драйвер работал как можно быстрее.
Все эти примеры будут сделаны с моим простым драйвером и бигеasy драйвером шагового двигателя, водительскими платами, несколькими разными шаговыми двигателями, которые я валю вокруг лаборатории. Я буду генерировать импульсы шага и направления с anarduinounoandachipkituno32, хотя все эти примеры должны работать с любым Arduino orArduino Клон или Arduino совместимый (как и все чипкитборды).
Не забудьте прочитать обучающий блог Dan Thompson'sexcellentEasyDriver postifyou, который вы хотите прочитать больше об этом материале. Некоторые вопросы отвечали в комментариях к этому блогу.
Примечание 1: Все примеры будут одинаково хорошо работать с простыми драйверами или большими EasyDrivers.
Примечание 2: Все примеры будут работать на Arduino, а также на чипсет (некоторые из них будут работать гораздо лучше на чипсет из-за скорости pic32.)
Примечание 3: Все примеры показывают Цилиндрический разъем для ввода питания-Вам нужно как-то поставить питание EasyDrivers, но это не нужно bea barrel jack. Вы должны иметь источник питания, который может выводить somevoltage между 5 В и 30 В, при 1 Ампер или более.
Пример 1: Базовая Настройка Arduino
Thisis самый основной пример, который вы можете иметь с Arduino, EasyDriver и шаговым двигателем. Подключите четыре провода двигателя к легкому драйверу (обратите внимание на соответствующие соединения катушки), подключите блок питания 12 В к контактам питания и подключите Arduino'sGND, pin 8 и pin 9 для легкого драйвера.
![22]()
Загрузите этот эскиз и запустите его на вашем Arduino orchipKIT:

Настройка пустоты () {
PinMode (8, выход);PinMode (9, выход);DigitalWrite (8, LOW);DigitalWrite (9, LOW);}Пустая петля () {DigitalWrite (9, HIGH);Задержка (1);DigitalWrite (9, LOW);Задержка (1);} Это не намного проще. Что делает код? В качестве выходов устанавливается pin 8 и 9. Он устанавливает их оба низко, чтобы начать. Затем в основной петли, он просто переключает pin 9 высокий и низкий, ожидая 1 мс между переключателями. Мы используем pin 9 в качестве шага управления andpin 8 в качестве управления направлением для легкого драйвера.
Sincewe не тянет ни MS1, ни MS2 низко на легком драйвере, простой Драйвер по умолчанию в 1/8th микрошаговый режим. Это означает, что каждый раз, когда "digitalWrite (9, HIGH);" вызов выполнен, шаговый двигатель будет перемещать 1/8th полного шага. Таким образом, если ваш двигатель составляет 1,8 градуса за шаг, будет 200 полных шагов за оборот, или 1600 микрошагов perrevolution.
Как быстро этот код будет запускать шаговый? Ну, с шагом 1 мс и 1 мс низким, каждый Полный Пульс займет 2 мс времени. Так как в 1 секунду 1000 мс, то 1000/2 = 500 микрошагов/секунд.
Что мы хотели, чтобы двигатель шел медленнее? Мы меняем задержку (); linesto имеет более длительные задержки. Если вы используете задержку (10); для обоих, you'llmove на 50 микрошагов/секунд.
Какой двигатель вам нужен, чтобы двигаться быстрее? Мы не можем задержать менее 1 мс, не так ли? Да, конечно, мы можем! Мы можем изменить задержку () звонков на delayMicroseconds (100); звонки и затем каждый delayбудет 100 микросекунд (или США), так что двигатель будет управляться at5000 микрошагов/секунд.
Теперь, одна вещь, с которой вы должны играть,-это текущий Регулируемый горшок для вашего легкого драйвера. Вам нужен маленький винтовой драйвер, чтобы повернуть его, и не забудьте заставить его слишком далеко так или иначе (они деликатны). Кроме того, некоторые легкие водители были построены с горшками, которые haveno физически останавливает на них, поэтому они вращаются вокруг и вокруг. Как ваш код выше, медленно поверните горшок так или иначе. В зависимости от типа двигателя, который у вас есть (и его сопротивления), вы можете слышать/чувствовать себя без разницы, так как вы вращаете горшок, или вы можете заметить довольно большую разницу.
Пример 2: перемещение вперед и назад
Если мы примем Пример 1 и просто Немного изменим эскиз, wecan перемещает определенное количество шагов вперед или назад. Likeso:
Расстояние int = 0;/запись количества шагов, которые мы сделали
Настройка пустоты () {PinMode (8, выход);PinMode (9, выход);DigitalWrite (8, LOW);DigitalWrite (9, LOW);}Пустая петля () {DigitalWrite (9, HIGH);DelayMicroseconds (100);DigitalWrite (9, LOW);DelayMicroseconds (100);Расстояние = расстояние + 1;/запись этого шага /Проверьте, находится ли мы в конце нашего движенияЕсли (расстояние = 3600) {/Мы! Обратное Направление (сигнал invert DIR)If (digitalRead (8) = LOW) {Цифровой ввод (8, высокий); }Еще {DigitalWrite (8, LOW); }/Сбросить наше расстояние до нуля, так как мы/Начало нового движенияРасстояние = 0;/Теперь пауза на полсекундыЗадержка (500); }}Сейчас, используя этот эскиз, мы Перемещаем 3600 шагов в одном направлении, немного увеличиваем и Перемещаем 3600 шагов в другом направлении. Я уверен, что вы можете понять, как сделать много различных длин ходов сейчас. И вы можете изменить задержку между шагами для каждого перемещения, чтобы произойти отдельные скорости.
Пример 3: использование предварительно построенной библиотеки-AccelStepper
Одна вещь, приведенная выше, не может быть хорошо обработана несколькими ступенями от того же Arduino или chipKIT. Кроме того, ускорение и замедление также затруднены. Другие люди столкнулись с этой проблемой, и теперь у нас есть библиотеки, которые мы можем загрузить и установить в IDE Arduino или MPIDE для решения этих проблем.
Загружайте zip-файл для AccelStepper libraryfromthispage. Отстегните загруженный файл и поместите AccelStepper в папку thelibraries в вашем Arduino install directory. Обратите внимание, что пользователи forMPIDE (chipKIT), вам нужно скопировать пакет AccelStepper в папку библиотеки на высшем уровне, а также \ hardware \ pic32 \ libraries, чтобы обе стороны AVR и PIC32 могли использовать его.
Используйте те же аппаратные средства из примера 1, перезагрузите IDE и введите следующий эскиз:
# Включая
/Определите шаговый элемент и контакты, которые он будет использоватьAccelStepper stepper (1, 9, 8);Int pos = 3600;Настройка пустоты (){ Шаговый механизм. setMaxSpeed (3000);Шаговый механизм. Установка ускорения (1000);}Пустая петля (){If (шаговый. distanceToGo () = 0) {Задержка (500);Pos =-pos;Stepper.mo veTo (pos); }Stepper.ru n ();}Этот код делает в основном то же самое, что и пример 2, но Ускорение/замедление с помощью библиотеки AccelStepper и запуск в два раза больше шагов. (Спасибо г-ну Даффи за то, что указали на этот факт!) причина, по которой он работает в два раза больше шагов, заключается в том, что мы делаем «pos =-pos», чтобы держать вещи короткими и простыми. Это означает, что thatit будет работать от 0 до 3600, затем от 3600 до-3600 (что составляет 7200 шагов).
ПРИМЕР 4: запуск нескольких шаговых двигателей
Одна из отличных вещей библиотеки AccelStepper заключается в том, что вы можете запускать так много шаговых двигателей, как вы хотите, в то же время, просто делая больше AccelStepper объектов. Теперь, если вы попытайтесь запускать их быстро, шаги не будут гладкими, поэтому вам нужно быть внимательными, не слишком сильно отклоняясь от Arduino. ChipKIT не имеет такой проблемы, потому что он намного быстрее, чем theArduino.
В этой схеме, теперь у нас есть два простых драйвера и два шагового двигателя. Нам просто нужно еще 2 контакта от Arduino, чтобы добавить этот второй двигатель.
![7]()
Код для этого примера ниже:

# Включая
/Определите две машинки и булавки, которые они будут использоватьAccelStepper stepper1 (1, 9, 8);AccelStepper stepper2 (1, 7, 6);Int pos1 = 3600;Int pos2 = 5678;Настройка пустоты (){ Шаг 1.setmaxspeed (3000);Stepper1.setAcceleration (1000);Stepper2.setMaxSpeed (2000);Stepper2.setAcceleration (800);}Пустая петля (){If (stepper1.distanceToGo () = 0) {Pos1 =-pos1;
Шаг 1.moveto (pos1); }If (stepper2.distanceToGo () = 0) {Pos2 =-pos2;Шаг 2. MoveTo (pos2); }Шаг 1.run ();Шаг 2. Запуск ();}
Если вы используете этот код, вы можете обнаружить, что ускорение и замедление не так гладкие, как с одним двигателем (на anArduino-снова, эта проблема не возникает на chipKIT) -Потому что наши две максимальные скорости (3000 и 1000) довольно высоки, что позволяет процессору обрабатывать их. Одним из решений является уменьшение максимальной скорости, а затем Переключение с 1/8 микрошагового режима to1/4, половинного или полного шага. Если все сделано правильно, вы увидите скорость вращения sameshaft, но с меньшей загрузкой процессора (потому что вы генерируете столько шагов в секунду).
Вы можете видеть, что для этого примера, я только что скопировал и вставил codeот пример 3 и сделал две позиции и две steppers. Код thisxample очень прост и не очень полезен, но вы можете изучить существующие примеры из библиотеки AccelStepper и прочитать страницы справки на различных функциях, и получите хорошие идеи о том, что еще вы можете сделать с вашим шаговым управлением.

 Идёт загрузка...
Идёт загрузка...Отзывы о других товарах
Надежда: Мне понравилось, что у этой футболки большой выбор размеров и я без проблем отыскала себе футболку по размеру. Качество среднее, не буду расхваливат...
Читать полностью...
Екатерина: Заказывала его для дочери. Идет от шести лет. Количество деталей 117 шт, достаточно крупные. Элементы яркие, всего хвати...
Читать полностью...
Евгения: Обожаю джинсовые вещи, поэтому никогда не смогу отказаться от такой покупки. К тому же, модель принципиально новая и выглядит необ...
Читать полностью...
Оксана: Довольно не плохой конструктор , заказывали его для дочки так как хотела себе домик для принцессы. Пришло все в точности как в описании , все целое и красивое. Детали к...
Читать полностью...
Мария: Подыскивала нечто клубное, но не вызывающее. Найти такое трудно, либо откровенные вырезы, либо полупрозрачная ткань, либо вообще латексная. Этот топик и праздни...
Читать полностью...
Вячеслав: Заказал себе такую курточку на весну, отправили и доставили довольно быстро. Привлекла цена вещи, которая по акции оказалась н...
Читать полностью...
Данный товар, можно так же приобрести с кэшбэком до 5%! Подробнее тут:










