






Робот рычаг bionic 9g GS9018 с 5 пальцами металлический микро сервопривод сделай сам

X-Robot Store
Информация о магазине
Стаж работы магазина X-Robot Store можно посмотреть на странице заказа товара.
*Внимание! Точную цену на данный товар Вы можете узнать непосредственно у продавца! На 26.04.2026 стоимость указанная на данной странице уже могла измениться! * Узнать цену *
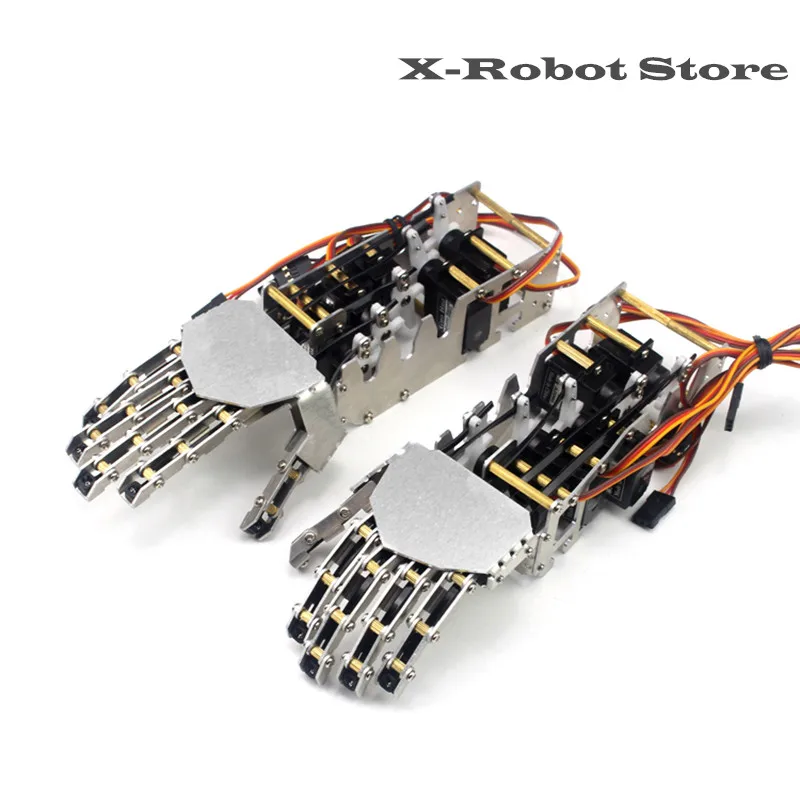
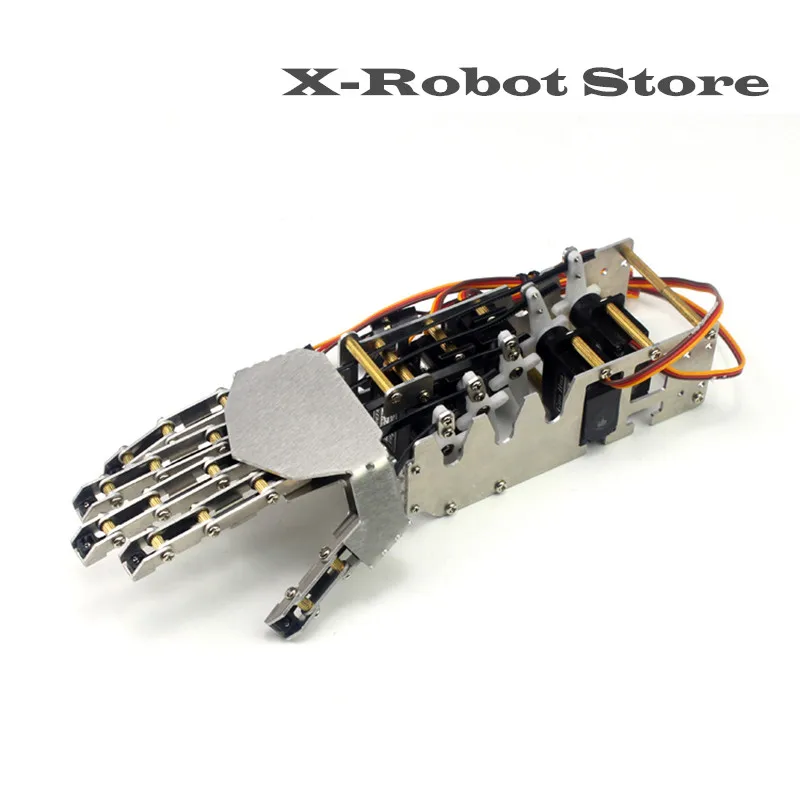
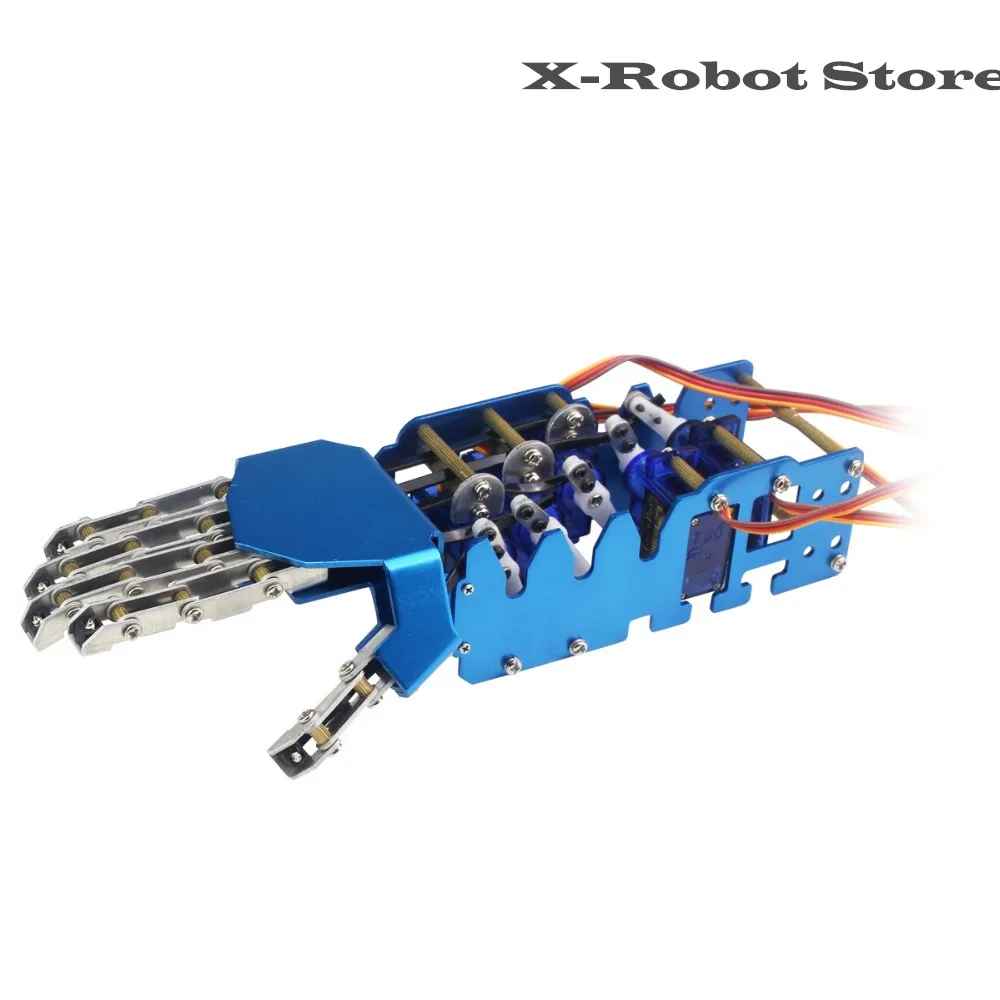
5 пальцев бионический робот металлический робот рука DIY микро сервопривод 9g GS9018 независимое движение установка робот игрушка + серводвигатель тест
Описание:
-Он использовал 6 сервоприводов для управления и управления, каждый палец может двигаться отдельно -5 степень свободы -Более гибкий и может свободно перемещаться. Вы можете "сделай сам" -Это Левая или правая рука Сервопривод: -Micro servo 9g GS9018 -С помощью винтов Параметры:Размеры: 76 мм * 53 мм (2,99 дюйма * 2,09 дюйма)
Вес: 37 г (1,31 унций)
Посылка Содержание:(Не установлен)
-1 х сервотестер -1 * левая часть Или правой части -12 * GS9018 сервопривода
Если у вас есть какие-либо вопросы, пожалуйста, не стесняйтесь обращаться к нам в службу поддержки lewansoul.com, мы предложим вам помощь как можно скорее



 Идёт загрузка...
Идёт загрузка...Отзывы о других товарах
Елена: Заказывала их для мужа. У него они как расходный материал, теряет во время ловли или еще чего нить с ними случается. Сами приманки легкие, весом...
Читать полностью...
Тимофей: Учитывая мою занятость, я спортом успеваю заниматься по 1 часу и три раза в неделю. Для контроля калорий и состояния физической активности, использую спортивные часы Bang...
Читать полностью...
Елена: Часто по дому разбросаны разные вещи. В основном это детская одежда и игрушки. Далеко не всегда имеет смысл все это раскладывать в шкафах по полочкам. Все равно ...
Читать полностью...
Антон: Хорошие светодиодные пластины, установил на шиномонтажном станке, чтобы колесо было видно четко. От 30 ватт уже нормально освещают. Припайке нужно учитывать т...
Читать полностью...
Инна: Нам с дочкой нужны были платья для фотосессии. Хотелось, чтоб они были и нарядными, и чтоб потом можно было носить их на любой случай. Здесь б...
Читать полностью...
Оксана: Довольно не плохой конструктор , заказывали его для дочки так как хотела себе домик для принцессы. Пришло все в точности как в описании , все целое и ...
Читать полностью...
Данный товар, можно так же приобрести с кэшбэком до 5%! Подробнее тут:










